|
|
|
Joe Brodman's 94 Formula (and other stuff) | home
Robot
 This is the Autonomous Robot me and a 4 friends did for our Senior Project. Put simply, this thing is bad ass, and was probably one of the best Senior Projects the school has seen.
Once I can gather up all the technical documents we wrote up on this thing, I'll put them on here too. For now, here is a "simple" explanation of the robot.
The project required that the user turn on the item, and it would go from there, and end by either shutting itself down or going into a "closed loop" type of mode. For the record, several projects didn't follow this and still got A's: We went WWAAAAYYY overboard on this project.
We designed it to travel north. When it detected an object in front of it, the sonar would ping left and right. Whatever distance was determined to be longer, the robot would turn 90 degrees, and travel that distance. It would then look north of itself, and ones the object, barrier, etc. was cleared, it would travel a short distance farther and turn another 90 degrees and face north again. It would repeat the process then. When it discovered it could no longer travel north regardless of going left and right, it would just keep going back and fourth, essentially going into a "closed loop" mode. This is a very quick and dirty explanation. We could have also easily have programmed it to turn around and go south, turn itself off, etc.
 Looking at the front of the robot, you can see several very important sensors. The three sensors on green circuit boards are infrared proximity detectors. There job was to make sure the robot would not bump into anything. When going forward, the front IR sensor detected for an object in front of it. When one was discovered, it would stop the robot, which then would take the next step into deciding if it should travel left or right. The side sensor were really neat. You could put your hand in front of them, and the robot would steer away from your hand. Pretty sweet.
The rectangle sensor in the center of the robot is the sonar sensor. It was mounted on a servo. Once the IR sensor detected an obstruction north of it, the sonar would ping east and west, determine the longest distance, and the robot would turn that direction. When traveling east or west, the sonar would point itself north, constantly pinging and determining when the object had been cleared.
The rectangle box on top of the PVC pipe is the electronic compass. It determined what was N, S, E, and W. This allowed the robot to travel in a straight path. That thing is a royal PITA to work with and get perfected, but we did get it to work.
The black box in front of the front wheel is the CCD Camera. This, along w/ an onboard transmitter, allowed us to watch the robot travel on TV. This was just an extra toy we wanted to add to it. It is pretty sweet to watch the robot travel from its own perspective.
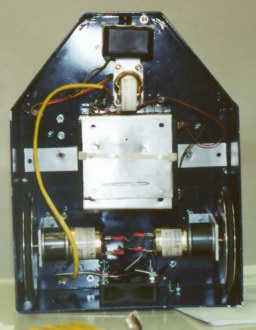 This is the underside view of the robot. The metal box in the middle is the battery for the robot. The wheels and motors are at the bottom of the picture. The front wheel is at the top. The drive system is probably the weakest part of the robot. We had a lot of meeting deciding what we would use for this. We discussed tracks (like a tank), steering system, etc. The robot turns by applying more power to one wheel. When doing a 90 degree turn, one wheel goes forward, the other goes in reverse. Unfortunately, the motors needed to be stronger. Also, the front wheel (a caster), was a POS, and caused some guidance problems. The robot could only drive effectively on smooth, hard surfaces. Some drive line modifications would have easily fixed these problems, but we ran out of times and it really wasn't necessary.
 The silver box houses the power supply. Below it, the black box houses the Motorola CPU. It has an LCD readout (just another added toy). On top of the silver box (can't see it in this picture), the transmitter for the CCD camera is located there.
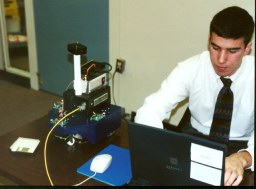 Here is Mike, our team leader, uploading the programming to the robot. When doing the project, the robots memory was stored in RAM, so that we could easily update the program whenever we need. The only problem is that every time the robot was turned off, it needed reprogrammed before it could run again. Once we were done with the project, an EEPROM was installed, and the final program was burned into it. So now the robot runs without any need for uploads.
 The rest of my group. From left to right: Mike, Brad (my roommate), Tommy (96 WS6), and Doug. This project was a TON of work, and we went way overboard on it. It was kinda fun, but I don't think we would do a project like that again!
|
||